
|
|
|
|
|
|
|
|
-
Описание системы блокировки разъединителей на примере реализованного проекта.
-
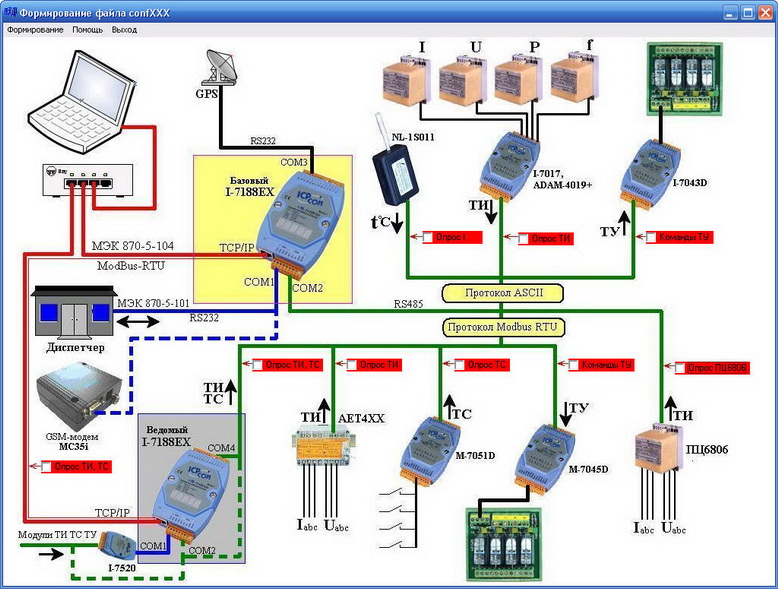
Утилита производителя для конфигурирования модулей телесигнализации, телеизмерений, телеуправления
Для телемеханизации энергообъектов компания ООО "ЦентрЭнергоАвтоматика" предлагает в максимальной степени унифицированное решение на базе программируемых контроллеров I-7188EX, uPAC-7186EX, I-8831, iPAC-8841 и модулей ввода-вывода I-7000/M-7000 (I-7017, I-7041, M-7051D, I-7043) и I-8000 серий производства компании ICP DAS - телемеханическую информационно-управляющую систему (ПТК "ТМИУС КП").
В качестве измерительных преобразователей предлагается использовать цифровые измерительные преобразователи переменного тока и напряжения серии АЕТ-ХХХ производства завода "Алекто" (г.Омск), ПЦ6806 производства ООО "НПП ЭЛЕКТРОМЕХАНИКА" и PM130 производства SATEC(Израиль).
В комплексе используются стандартные протоколы ModBus RTU (ASCII) для сбора ТС, ТИ и ТУ на уровне объекта и протоколы ГОСТ МЭК-870-5-101/104, TCP/IP-Modbus для передачи параметров телеметрии на уровень ДП.
ПТК “ТМИУС КП” относится к системам открытого типа, архитектура которых является проектно-компонуемой, при этом типы и количество технических и программных средств комплекса определяются количеством параметров телеметрии объекта: ТС, ТИ, ТУ.
Модернизация программно-технического комплекса осуществляться путем исключения или добавления отдельных функциональных модулей.
Используемые в системе модули имеет наработку на отказ не менее 80 000 часов. Рабочий температурный режим от -25° до +70° .
Общие функции комплекса:
-
Прием данных телеизмерений, телесигналов и выдача команд телеуправления по протоколу ModBus RTU (ASCII);
-
обработка и передача данных телеметрии на верхний уровень АСДУ по протоколу ГОСТ МЭК-870-5-101/104;
-
возможность передачи данных на верхний уровень по нескольким направлениям;
-
логический анализ ТС выключателей, разъединителей, заземляющих ножей и необходимых значений телеизмерений подстанции и выдача команд управления электромагнитными замками по заданному алгоритму в схеме электромагнитной блокировки разъединителей;
-
задание апертур для каждого телеизмерения;
-
задание нескольких порогов уставок для каждого телеизмерения;
-
контроль и отображения телеметрии КП;
-
возможность однопозиционного, двухпозиционного телеуправления;
-
прием данных с датчиков РПН;
-
прием данных с блоков цифровых защит РЗА;
-
диагностика параметров системы;
-
запрос времени от источника точного времени GPS, с последующей корректировкой времени внутренних часов;
-
привязка принятых данных к меткам времени.
Общая структурная схема системы телемеханики
Система телемеханики объекта строится как распределенная информационно-управляющая система на базе программируемых контроллеров и модулей ввода-вывода серии серийного производства, объединенных в ЛВС со средствами вычислительной техники.
В структуру СТМ входят технические средства, распределенные по трем уровням иерархии:
К нижнему уровню относятся:
- цифровые измерительные преобразователи ТИ АЕТ (ПЦ6806);
- аналоговые измерительные преобразователи ТИ (Е855) и контроллеры аналогового ввода ТИ (АЦП M-7017RC);
- контроллеры дискретного вывода (M-7045D) с модулями выходных реле телеуправления (RM104).-
Ко второму уровню системы относятся:
- коммуникационные slave-контроллеры uPAC-7186EX телемеханики и подсистемы управления блокировкой разъединителей. -
К третьему уровню системы телемеханики относятся:
- головной контроллер телемеханики uPAC-7186EX (контроллер №1);
- технологическая ЛВС, коммуникационное оборудование, система точного времени GPS, устройства электропитания;
- пульт контроля.
Общая структурная схема телемеханической информационно-управляющей системы контролируемого пункта (ТМИУС КП) представлена на рисунке 1.
Опрос ТС типа “сухой контакт” и ТИ от аналоговых преобразователей контроллером uPAC-7186EX осуществляется через модули дискретного ввода М-7051D (на 16 входов) и аналогового ввода M-7017RC (на 8 входов), соответственно, по физическим линиям связи интерфейса RS-485 по протоколу ModBus RTU (ASCII). От коммуникационных slave-контроллеров uPAC-7186EX по опросу головного контроллера телемеханики (контроллер №1) параметры телеметрии передаются на верхний уровень АСДУ по протоколу МЭК-5-870-101(104) или TCP/IP Modbus и на пульт контроля объекта, подключенному непосредственно к контроллеру через порт Ethernet по протоколу TCP/IP Modbus, через коммутатор, либо через точку доступа беспроводной связи WiFi.
Опрос ТИ коммуникационными контроллерами от цифровых измерительных преобразователей осуществляется по линиям связи интерфейса RS-485.
Команды телеуправления с верхнего уровня АСДУ оборудованием объекта принимаются и обрабатываются головным контроллером uPAC-7186EX и реализуются по линиям связи интерфейса RS-485 в протоколе Modbus ASCII через модули дискретного вывода M-7045D (на 16 каналов) и блоки выходных реле RM-104.
Кроме функции удаленного телеуправления оборудованием, контроллер uPAC-7186EX обладает функционалом локальной автоматики управления оборудованием в соответствии с задаваемыми алгоритмами управления, что реализуется для системы управления электромагнитной блокировкой разъединителей от ошибочных действий оперативного персонала.
Для быстроменяющихся процессов (точность до 1 мс) и большого количества телеметрии и измерительных преобразователей используется линейка контроллеров iPAC-8841 с большими коммуникационными возможностями. Структурная схема показана на рисунке 2.
Построение системы управления блокировкой на базе программируемого контроллера заключается в сборе информации о состоянии положения выключателей, разъединителей и заземляющих ножей, их логической обработке на предмет соблюдения необходимых условий для выдачи команды телеуправления на включение цепи питания ± 220 В и, собственно, в самой подаче питания на соответствующий электромагнитный замок разъединителя или заземляющего ножа через выходные реле управления.
Конфигурация системы телемеханики и формирование алгоритмов управления блокировкой разъединителей объекта осуществляется через графический интерфейс пользователя, функционирующий в ОС “Windows/ХР” (см. рисунок 3).
На пульте контроля осуществляется визуализация состояния объекта, контроль работы модулей комплекса.
Для эксплуатационного персонала для контроля системы и параметров реального времени поставляется сервисное программное обеспечение.
Графический пользовательский интерфейс конфигуратора системы
На уровне подстанций с небольшим объемом ТС, ТИ в качестве телемеханики предлагается использовать программируемые контроллеры uPAC-7186EX, задачей которых является опрос цифровых измерительных преобразователей типа AET, ПЦ-6806 и модулей сбора ТС M-7051D по линиям связи интерфейса RS-485 по протоколу Modbus RTU и передача данных телеинформации с меткой времени на уровень ДП по протоколу МЭК 870-5-101.
В рамках работ по реконструкции систем телемеханики также выполняются работы по выводу ТС от выключателей, разъединителей 110, 35, 10(6) кВ и ЗН для внедрения системы управления блокировкой разъединителей.
Как показали расчеты, дооснащение системы ТМ объекта подсистемой управления блокировкой разъединителей не превышает 20-22% от общей стоимости затрат на реконструкцию системы ТМ.
Конкурентные преимущества предлагаемых технических решений
-
Использование на уровне контроллера uPAC-7186EX унифицированного программного обеспечения, обеспечивающего применение программируемых контроллеров, как в качестве классической телемеханики, так и для системы управления блокировкой разъединителей, позволяет в максимальной степени повысить эффективность капиталовложений Заказчика, сократить издержки на внедрение систем, подготовку персонала и эксплуатацию систем.
-
Автоматизированное конфигурирование системы c использованием графического интерфейса сокращает время наладки, а заложенные при этом алгоритмы контроля, практически полностью исключают ошибки эксплуатационного персонала.
-
Использование контроллера uPAC-7186EX обеспечивает, при наличии соответствующих каналов связи, включение КП по TCP/IP в локальные сети АСДУ.
-
Использование современных технологий, в частности беспроводного доступа Wi-Fi, позволяет вести контроль за производством переключений на объекте и контроль за режимными параметрами системы через мобильные устройства, такие как КПК, Ноутбук, коммуникатор, что сокращает время на развертывание системы контроля при производстве переключений или ремонтно-профилактических работах.
-
Использование стандартных протоколов Modbus, TCP/IP, МЭК 870-5-101/104 дает широкие возможности для интеграции системы с другими смежными системами, включения новых устройств, наращивания и развития системы.
-
Телемеханизация энергообъектов и внедрение систем управления блокировкой разъединителей от ошибочных действий персонала на подстанциях на основе одних и тех же программных и технических компонентов обеспечивает Заказчику значительное снижение затрат как на внедрение этих систем, так и последующих эксплуатационных издержек на их обслуживание.
-
Использование стандартных, общепризнанных во всем мире, средств промышленной автоматизации, конфигурирование системы и формирования алгоритмов управления на уровне пользователя через удобный пользовательский интерфейс в среде Windows, легкость в освоении технологии внедрения систем, в максимальной степени исключает критическую зависимость Заказчика от поставщика программно-технических комплексов.
| г. Москва ул. Автозаводская, 14/23 тел. (495) 234-7644 info@cea-energo.ru © 2006-2010 ООО "ЦентрЭнергоАвтоматика" |